Per il controllo della piattforma, ho realizzato un circuito elettronico che aziona i motori, controlla gli encoder, legge i dati provenienti dal PC , gestisce i pulsanti di "avvio" e "stop", aziona la vibrazione del sedile.
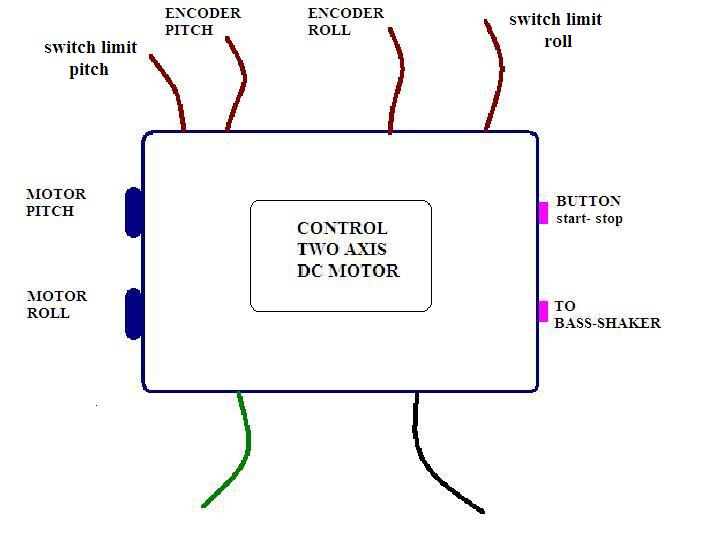
Di seguito il diagramma a blocchi.
Mi scuso per lo schema, certo non bello a vedersi. Colgo l'occasione per chiedere se qualcuno degli interessati volesse riproporlo in una forma più presentabile possibilmente sbrogliato.
Descrizione:
L'integrato MAX232 converte i valori elettrici della porta seriale RS232 del PC in valori 0-5V.
Le PIC 16f628 sono state programmate per assolvere ai seguenti compiti:
La PIC 16f628 Master analizza la stringa di caratteri proveniente dal PC, il risultato dell'elaborazione viene inviato alle PIC che gistiscono gli assi.
Le PIC16f628x e PIC16f628y leggono la posizione della piattaforma dall'encoder e agiscono sui motori per modificarla in base a quanto comandato dalla PIC 16f628 Master.
La PIC 16f628 Bass-Shaker riconosce il valore del numero giri motore e invia verso il FET IRF540 un segnale alla opportuna frequenza per il Bass-Shaker.
Per disaccoppiare il circuito elettronico dal circuito di comando motori, è stato usato il fotoaccoppiatore ILQ55.
AVVERTENZE
La zona di potenza delineata dalla linea rossa tratteggiata non deve avere l'alimentazione in comune al rimanente del circuito.
Il 12V e il 5V hanno il negativo in comune.
Il 12V deve fornire almeno 2A mentre per il 5V bastano 500mA.
Per i meno esperti, consiglio di montare tutti gli integrati su zoccolo, dopo aver eseguito tutte le saldature consiglio di verificare che i pin adiacenti non siano in corto. Eviterete così che la PIC si bruci.
Prima di inserire le PIC, verificate l'alimentazione stando attenti che non ci siano le polarità invertite, altrimenti si brucieranno dopo il surriscaldamento.
E' indispensabile azionare con un pulsante l'avvio della piattaforma solo dopo che si è preso posto sul sedile e i piedi ben sistemati sull'apposito alloggiamento.
Consiglio di usare un pulsante di stop molto grande per rendere facile l'immediato arresto nel caso di emergenza.
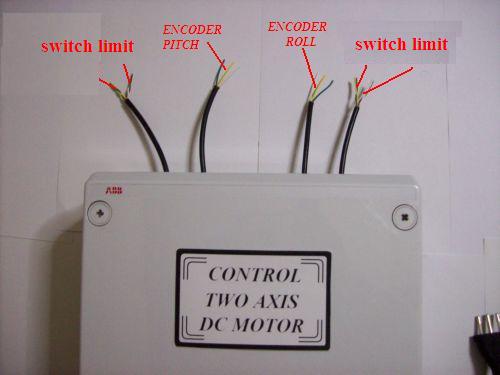
CONTATTI DI FINE CORSA
Per evitare che a causa di una rottura o errata taratura degli encoder, il sistema continui la corsa oltre il massimo consentito e crei una condizione di pericolo nonchè danni alla struttura e ai motoriduttori, è stato previsto il blocco elettronico grazie a 4 interruttori a pulsante (switch). Tali pulsanti debbono essere opportunamente sistemati per far si che vengano azionati quando si raggiunge il fine corsa voluto.
Tali interruttori debbono stare nella condizione di contatto chiuso ed aprirsi quando vengono azionati.
Di seguito un esempio di posizionamento dei fine corsa.
ATTENZIONE
E' importante creare i due triangoli (uno per lato) come riportati in colore grigio nel disegno sopra, per impedire che la mano finisca tra la culla e il supporto, correndo il rischio di farsi male.
I triangoli possono essere realizzati in plexiglass, compensato o altro dallo spessore di 3mm circa.
I due interruttori del fine corsa del beccheggio, possono essere fissati su uno dei due triangoli.
L'alimentatore del circuito elettronico non necessita di molti componenti.
Costa poco e fornisce un'ottima potenza.
Ho optato per il trasformatore di tipo toroidale, è abbastanza compatto e costa meno degli altri.

Il Circuito è di contenute dimensioni.
La parte di potenza usa dei MOSFET che debbono essere opportunamente raffreddati con opportune alette di dissipazione.
Il sistema completo.


COMPONENTI
I principali componenti li ho acquistati dalla
http://www.rs-components.com/index.html e https://www.distrelec.it
---------------------------------------------------------------------------------
STP80PF55 RS Art. 4857901
STP80NF03L RS Art. 4862363
POTENZ. 10 GIRI 50K RS Art. 1070808
RADRIZZATORE A PONTE DISTR. Art. 602048
ILQ55 DISTR. Art. 631800
TRASFORMATORE RS Art. 352716
TRIMMER RS Art. 742166
CONDENSATORE ENCODER RS Art. 821128